Pixhawk ArduPilot에서는 IR-Locker를 사용하면 정밀 착륙이 가능하다.

IR-lock은 두가지로 구성되어있다.
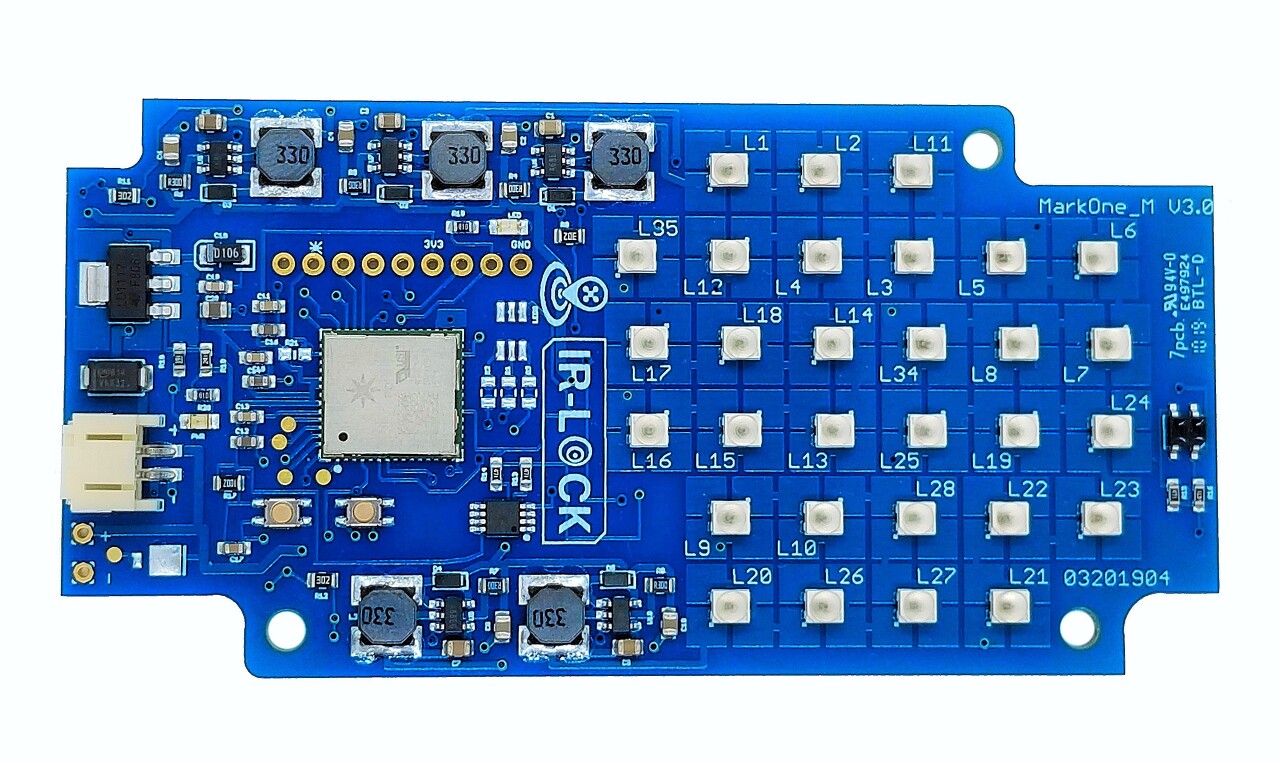
IR-Lock sensor와 Markone이다
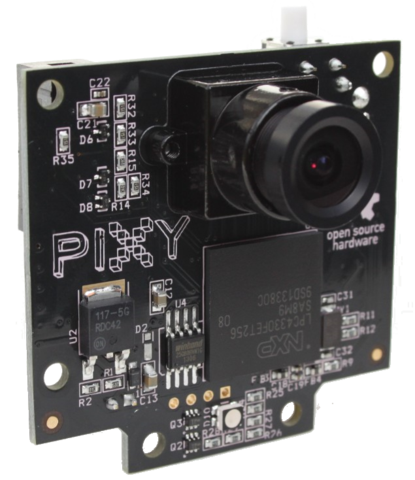
IR-Lock sensor가 Markone에서 방출하는 빛을 감지, 빛을 Feature로 인식하여 X,Y축 위치 제어를 통해 정밀 랜딩을 수행하는것으로 판단된다.
우선 PC에서 Markone의 빛을 IR-Lock이 잡아내는지를 확인하여야 한다.
cmucam.org/attachments/download/1246/pixymon_windows-2.0.9.exe
여기서 PixyMon 2.0.9를 다운로드 받아서 설치한다.
드라이버를 설치하게 되면 PC가 정상적으로 인식하게 된다.
그리고선 PixyMon 2.0.9를 언인스톨 한다.
우리가 사용하고자하는 IR-Lock은 1.0.2 버전의 PixyMon을 사용해야 한다.
cdn.shopify.com/s/files/1/0599/7905/files/pixymon_windows-1.0.2beta.exe?290
PixyMon 1.0.2을 설치하고 아래의 .Hex파일을 IR-Lock에 업로드 한다.
irlock.readme.io/docs/firmwaresoftware-links
Firmware/Software Links · IRLOCK
IR-LOCK precision landing system for drones and UAV systems.
irlock.readme.io
.Hex 업로드가 완료 된 후 모든 파라미터를 디폴트값으로 변경하여야 한다.
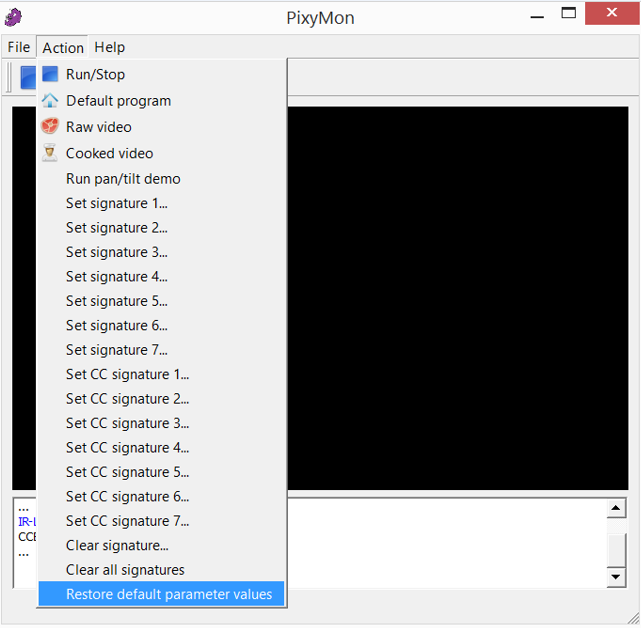
이제 PC 화면에 IR-Lock의 화면이 나타난다.
이제는 Markone에 전원을 넣어 적외선을 생성해줘야 한다.

전원을 넣어주면 IR이 방출이 된다. 눈으로는 안보인다. 가끔 핸드폰 카메라로 어두운 환경에서 보면 색이 보인다.
(하다가 카메라 날려먹은적이 있다 조심할것)
설정을 끝내면 위 동영상처럼 IR은 밝게 보이게 될것이다.
하지만 우리가 정밀 착륙을 하기 위해서는 객체가 정확하게 탐지 되어야 한다.
IR-Lock도 일종의 카메라다. 따라서 초점이 정확하게 맞아야만 정상적인 기능을 수행한다.
IR-Lock 앞에 보면 십자 나사가 있다. 그걸 제거한 후 랜즈를 돌려가면서 초점을 잘 맞춰야한다.
나의 경우 일반적인 고도상황을 기준으로 설정하였다.
따라서 10M 거리에 있는 피사체가 정확하게 나오는 초점으로 랜즈를 조정하였다.
이로써 IR-Lock의 기본 설정은 완료된다.