Pixhawk IR-Lock를 사용한 정밀 착륙 -1-
Pixhawk ArduPilot에서는 IR-Locker를 사용하면 정밀 착륙이 가능하다. IR-lock은 두가지로 구성되어있다. IR-Lock sensor와 Markone이다 IR-Lock sensor가 Markone에서 방출하는 빛을 감지, 빛을 Feature로 인..
poruttugi.tistory.com
우선 위 링크에서 IR-Lock 설정을 완료 하여야 한다.
설정을 완료 후 Pixhawk에 연결을 수행하여야 한다.
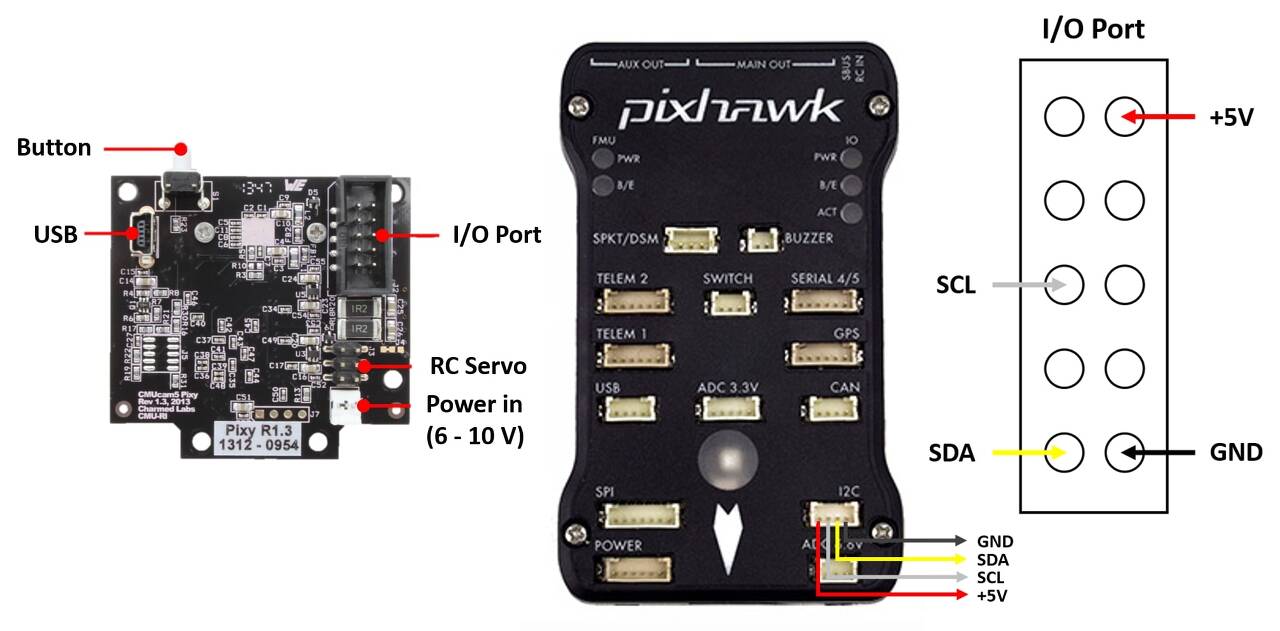
Pixhawk IR-Lock를 사용한 정밀 착륙 -1- 에서 언급한 것처럼 IR-Lock은 ArduPilot에서만 지원한다. PX4는
글을 쓰는 현재(2021.01.22) 지원하지 않는다.
Pixhawk를 다 연결 한 후 MissionPlanner에서 아래와 같이 파라미터를 설정한다.
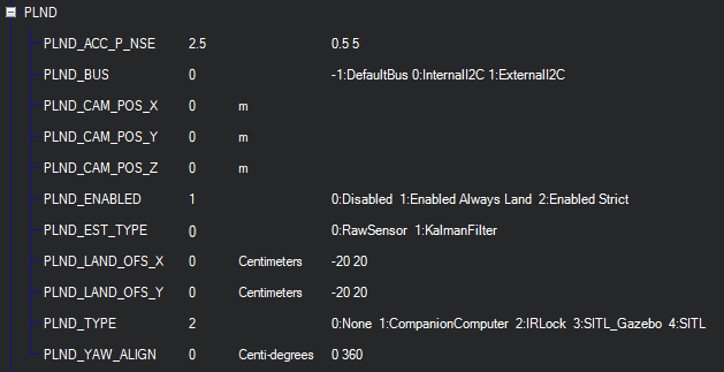
Pixhawk의 IR-Lock의 설정이 완료되었다.
하지만 IR-Lock을 사용하기 위해서는 Point Lidar를 사용하여야 한다.
Lidar 세팅은 따로 포스팅을 할 예정이다.
Lidar까지 세팅을 완료되면 정밀 착륙을 수행 할 수 있다.
Markone을 착륙하고자 하는 위치에 전원을 켜고 기체를 이륙한다.
그리고 조종기 트리거로 LAND 명령을 수행하면 기체가 X,Y축으로 이동 후 착륙을 수행한다.